
From August 10th to 13th, the 12th National Marine Vehicle Design and Construction Contest was held at Harbin Engineering University. This contest was jointly guided by the China Association for Science and Technology and the Ministry of Industry and Information Technology of China, and co-hosted by China State Shipbuilding Corporation, the Chinese Society of Naval Architects and Marine Engineers, the International Innovation and Cooperation in Naval Architecture and Marine Engineering Alliance, the Communist Youth League of Heilongjiang Province, and the Heilongjiang Association for Science and Technology, with Harbin Engineering University as the organizer.
A total of 2,785 teams from 371 universities and research institutes, including Harbin Engineering University, Tsinghua University, Shanghai Jiao Tong University, Harbin Institute of Technology, and Northwestern Polytechnical University, participated in the competition through a combination of online and offline methods. After regional evaluations and recommendations, 1,066 teams advanced to the national finals.
Students from the Gongxue Community achieved remarkable results in this contest, winning 15 national awards, including three national grande prizes, four first prizes, and eight second prizes, marking the best performance in the history of the Gongxue Community.
The teams that won the national grande prize are as follows:
Fu Mu Ming
Team Members: Kong Decheng, Xu Shenxi, Yuan Tianyi, Feng Ke, Chen Ziheng
Category: D - Famous Ship Model Simulation and Production
Advisors: Li Gang, Liu Yanbo
This project features a hand-crafted model of the Liaoning aircraft carrier made primarily of paulownia and pine wood, without the use of CNC equipment. The model includes innovative features such as wood assembly and glue bonding for easy assembly and environmental sustainability. Some components are integrated with circuits controlled by a microcontroller to simulate the lifting of carrier-based aircraft and changes in ship direction. The model also includes carrier-based aircraft and towing vehicles that can be freely positioned. The water scenery replicates historical scenes with an aged finish, and the model is coated with waterproof paint to ensure dryness and stability, aligning with the contest's theme of environmental sustainability.

Wukong Tan Hai (Monkey King Explores the Sea)
Team Members: Li Jintian, Deng Wenjun, Dong Jiawen, He Yanjin, Tao Wenmei
Category: D - Famous Ship Model Simulation and Production
Advisors: Du Shixin
The Wukong AUV symbolizes Harbin Engineering University's dream of becoming a marine power, capable of freely navigating deep seas and exploring ocean mysteries. The 1:2.25 scale model features a basswood frame with bamboo skin, bamboo strips, and linen canvas as the surface material. The meticulously crafted model, along with the water scenery and scenes, presents the Wukong embarking on a deep-sea expedition.

High-Speed Water Jet Icebreaking Device
Team Members: Zhao Yao, Cao Yuanju, Tan Wei, Yang Lishuai, Yu Zibin
Category: A1 - New Concept Creative Design
Advisor: Ni Baoyu
This project designed an icebreaking device using high-speed water jets and built an experimental platform to study the transient impact characteristics of high-speed water jets and the damage mechanism of ice samples. Innovations include the experimental setup for high-speed water jet icebreaking and a low-temperature chamber to prepare flat ice plates without bubbles and initial cracks. The project demonstrated the superiority of high-speed water jet icebreaking through conceptual design, theoretical analysis, model building, and experimental simulations. This technology has potential applications in Arctic regions or high-latitude areas during winter for icebreaking operations.

The four projects that won the national first prize are as follows:
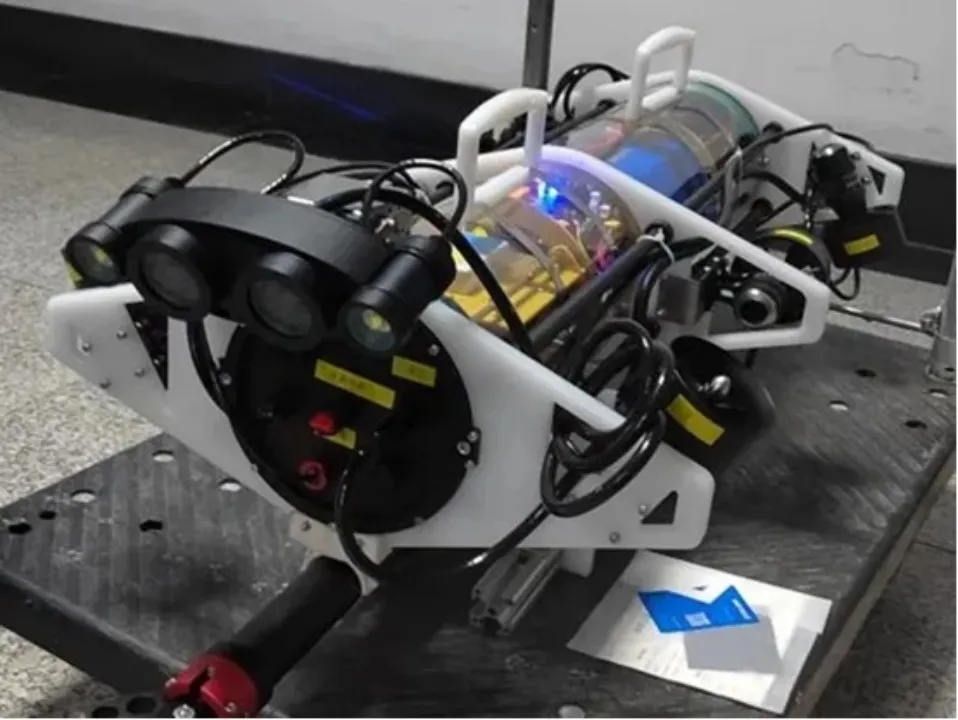
Xinghai-W12 Miniature Autonomous Underwater Vehicle
Team Members: Gu Tongtong, Xu Yihan, Diao Weiqing, Wang Hongyu, Mao Yichu
Category: B2 - Design and Production (Underwater Group)
Advisors: Sun Yanchao
This AUV uses multi-sensor positioning technology, including binocular cameras, inertial navigation modules, and motion model algorithms, to achieve underwater local and global navigation tasks. It features a vector thruster layout, six-degree-of-freedom full-drive propulsion, and attitude-holding technology, along with laboratory-developed brushless thrusters, verifying underwater vehicle control accuracy and motion stability. The AUV also has visual-based autonomous operation and auxiliary navigation functions, including underwater distance measurement, target detection, target capture, and autonomous navigation.
Into My Arms – Autonomous Cleaning Robot for Small and Medium Water Bodies
Team Members: Huang Silun, Zhang Jiwen, Zhu Zanrong, Wen Dekun, Jin Jianan
Category: B1 - Design and Production (Surface Group)
Advisors: Jiang Xiangli, Lu Xiaolong
This vessel uses gyroscopes and laser positioning for autonomous navigation and positioning. Sensors and the PP-YOLOE+ intelligent recognition algorithm enable precise target identification and recovery. Deep reinforcement learning is used for path planning, achieving autonomous and intelligent garbage collection. The MPC control algorithm and the ship's MMG motion mathematical model ensure high-precision identification and recovery. The twin-propeller, catamaran design allows for on-the-spot turning and high maneuverability. The vessel features intelligent garbage recognition and recovery, autonomous cruising, smart collision avoidance, real-time communication, and remote control, ensuring strong operational stability.

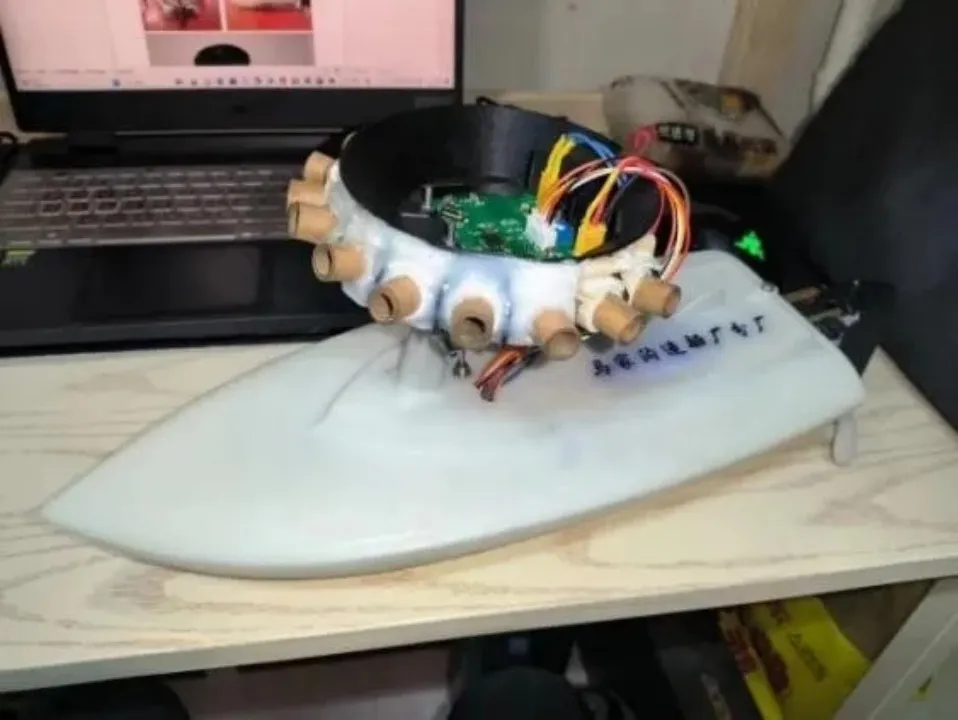
Majia Gou Xiaoshuai (Mr. Handsome in Majia Gou) – Intelligent Navigation Boat
Team Members: Chen Xiaoyang, Luo Jiaxiang, Shen Chengtai, Wang Guoxi, Zeng Sizhe
Category: C1-1 - Intelligent Navigation (Fully Self-Made Group)
Advisors: Sun Yanchao, Xu Sheng
This project includes a boat body, infrared receivers, angle adjustment devices, servos, and a control system. Fourteen infrared receiver sensors receive signals, processed by the STM32F103C8T6 and output to the L298N motor drive module and servo for speed and direction control. The mechanical design features a streamlined design, wave suppression board, and waterjet, enhancing speed and stability.
“Lucky” Infrared Sensing Intelligent Navigation Device
Team Members: Yang Jiaying, Pan Yiqi, He Miao
Category: C1-1 - Intelligent Navigation (Fully Self-Made Group)
Advisors: Yu Yali, Xu Yan
This model features a rational, streamlined, and symmetrical design, with foam boards for buoyancy to solve waterproofing and waterline issues. The hardware includes infrared reception and main control parts. Nine infrared receivers are arranged in a fan shape, transmitting signals to the microcontroller, which calculates the target azimuth. The main control part uses the microcontroller to control motor speed and servo direction via PWM.

These achievements are a testament to the hard work and technical prowess of the Gongxue Community's faculty and students. Each team underwent months of preparation and practice, continually optimizing and improving their designs to produce high-performance marine vehicles. This success not only recognizes the efforts of the Gongxue Community's faculty and students but also validates the college's teaching and research work in marine engineering. The JEI will use this opportunity to continue enhancing its professional standards, strengthening students' practical abilities, and contributing to the development of the national marine industry.